 案例详情
案例详情

 19872700032
19872700032
19872700032
19872700032
 3D打印新闻资讯景区倾斜摄影工厂倾斜摄影数字孪生酒店园区倾斜摄影建筑选型选配
3D打印新闻资讯景区倾斜摄影工厂倾斜摄影数字孪生酒店园区倾斜摄影建筑选型选配 官方公告
官方公告 行业资讯
行业资讯 技术分享城市倾斜摄影家具选型选配3D建模3d效果图景区点云扫描文物点云扫描交通点云扫描建筑3d动画家具3d动画web3D展示产品点云扫描展馆展厅全景建筑地产全景工厂车间全景景区景点全景商场门店全景街道社区全景智慧配送中心设备选型选配乡镇倾斜摄影交通倾斜摄影汽车选型选配校园倾斜摄影三维数字化服务问题列表热门案例
技术分享城市倾斜摄影家具选型选配3D建模3d效果图景区点云扫描文物点云扫描交通点云扫描建筑3d动画家具3d动画web3D展示产品点云扫描展馆展厅全景建筑地产全景工厂车间全景景区景点全景商场门店全景街道社区全景智慧配送中心设备选型选配乡镇倾斜摄影交通倾斜摄影汽车选型选配校园倾斜摄影三维数字化服务问题列表热门案例 智慧储能
智慧储能 720云实景VR
720云实景VR 3d电子说明书
3d电子说明书 山西3d可视化陕西3d可视化
山西3d可视化陕西3d可视化 海南3d可视化
海南3d可视化 北京3d可视化家具家装3d净化废气处理机房机柜设备水利水务环保设备园林景观数字沙盘交通路桥数字沙盘3d剖面分析图场景3d展示360环物拍摄换热制冷设备电力设备3d三维能效管家三维健康管家固废处理设备新疆3d可视化宁夏3d可视化充电桩设备青海3d可视化甘肃3d可视化西藏3d可视化四川3d可视化重庆3d可视化云南3d可视化贵州3d可视化天津3d可视化内蒙3d可视化吉林3d可视化黑龙江可视化3D高斯泼溅
北京3d可视化家具家装3d净化废气处理机房机柜设备水利水务环保设备园林景观数字沙盘交通路桥数字沙盘3d剖面分析图场景3d展示360环物拍摄换热制冷设备电力设备3d三维能效管家三维健康管家固废处理设备新疆3d可视化宁夏3d可视化充电桩设备青海3d可视化甘肃3d可视化西藏3d可视化四川3d可视化重庆3d可视化云南3d可视化贵州3d可视化天津3d可视化内蒙3d可视化吉林3d可视化黑龙江可视化3D高斯泼溅 上海3d可视化机械选型选配家电3d展示3d 安装动画智慧水务数字孪生建模3d数字化管理太阳能设备辽宁3d可视化数字孪生智慧城市3d可视化智慧产业园区智慧车间智慧产线农业林业3d建模健康医疗3d建模3d 原理动画三维解决方案智慧供暖数字孪生智慧燃气智慧城市3D可视化智慧园区智慧能源智慧电站智慧矿山数字孪生工厂数字孪生城市数字孪生港口智慧交通工厂3d可视化港口3d可视化智慧教育智慧管廊仓储3d可视化数字住房智慧楼宇技术问题业务咨询知识百科智慧物流智慧加油站机房3d可视化web3D展示3d产品展示3D动画数据实时监控三维系统开发智慧医疗3D可视化地图3D可视化建模3d可视化平台电力能源3d建模工业生产3d建模园区建筑3d建模物流仓储3d建模城市乡村3d建模城市3d可视化可视化建模知识技术原理软件工具行业标准方法流程园区3d可视化数字孪生水利数字孪生汽车数字孪生电厂3d拆解爆炸图3d 优化排产模型虚实联动智慧养老智慧社区虚拟现实 VR AR数字孪生技术知识电力3d可视化智慧路网3d数字沙盘智慧工业智慧工厂智慧城市智慧园区智能建筑智能家居智能制造智慧农业智慧水利智慧文旅AR虚拟仿真VR虚拟现实智慧港口码头智慧仓储智慧工地道路交通3d建模3d 选型选配智慧车站广东3d可视化福建3d可视化智慧农场智慧牧场智慧水产浙江3d可视化智慧桥梁智慧隧道智慧校园智慧课堂智慧图书馆智慧体育智慧医院智慧医学智慧医药江苏3d可视化机械设备机械零配件机械加工设备包装机械设备工程建筑机械电子制造设备山东3d可视化智慧金融智慧车联网生物科技智慧景区智慧博物馆智慧酒店智慧餐饮智慧游乐场VR全景展厅VR看房VR看车VR展览VR旅游VR校园广西3d可视化湖南3d可视化智慧城建智慧生态智慧节能智慧环保智慧公园智慧小镇智慧应急管理智慧市政智慧生活智慧物业智慧路灯智慧照明智慧灯杆智慧指挥中心智慧安防智慧消防智慧井盖智慧管网综合管廊智慧党建智慧政务智慧戒毒智慧档案智慧办公智能驾驶智慧停车智慧充电桩智慧海关智慧家庭电子购物智慧出行三维数据采集倾斜摄影航拍湖北3d可视化3d点云扫描720全景VR数字孪生系统江西3d可视化建筑楼宇数字沙盘生活用品交通运输电子电工污水处理设备医疗器械农业机械设备乘用车专用车非机动车汽车配件汽车用品安徽3d可视化楼宇3d可视化数字孪生园区数字孪生学校建筑3d可视化河南3d可视化智慧机房河北3d可视化智能电梯学校教育3d建模智慧分拣中心华南3d可视化华东3d可视化华中3d可视化华北3d可视化东北3d可视化西南3d可视化西北3d可视化台港澳3d可视化制造业工厂院前急救临床检验厨具餐具三维卫浴洁具三维物理康复风电场设备办公3d模型商业3d模型住宅3d模型厂房3d模型场馆3d模型体检诊查医用光学手术设备病房护理规划地产数字沙盘工业产线数字沙盘能源电力数字沙盘工业制造三维建模能源电力三维建模交通运输三维建模建筑楼宇三维建模健康医疗三维建模教育培训三维建模3d数字展馆3d虚拟商城实验室可视化宿舍可视化智慧工业园区智慧科技园区智慧物流园区智慧办公园区智慧商业园区智慧住宅园区产品3d动画工业3d动画气体工程设备党建3d展厅艺术3d展厅企业3d展厅工业3d展厅文博3d展厅门窗3d展示3d三维布局图3d悬浮小岛粉体机械设备服装选款选配冶金工程设备3d内部结构图3d 部件编辑矿山机械设备水电站设备热电站设备变电站设备能源站设备灯具辅控3d园区点云扫描2D纹理扫描场站点云扫描工厂点云扫描
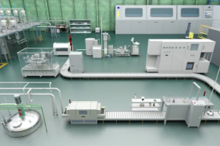
上海3d可视化机械选型选配家电3d展示3d 安装动画智慧水务数字孪生建模3d数字化管理太阳能设备辽宁3d可视化数字孪生智慧城市3d可视化智慧产业园区智慧车间智慧产线农业林业3d建模健康医疗3d建模3d 原理动画三维解决方案智慧供暖数字孪生智慧燃气智慧城市3D可视化智慧园区智慧能源智慧电站智慧矿山数字孪生工厂数字孪生城市数字孪生港口智慧交通工厂3d可视化港口3d可视化智慧教育智慧管廊仓储3d可视化数字住房智慧楼宇技术问题业务咨询知识百科智慧物流智慧加油站机房3d可视化web3D展示3d产品展示3D动画数据实时监控三维系统开发智慧医疗3D可视化地图3D可视化建模3d可视化平台电力能源3d建模工业生产3d建模园区建筑3d建模物流仓储3d建模城市乡村3d建模城市3d可视化可视化建模知识技术原理软件工具行业标准方法流程园区3d可视化数字孪生水利数字孪生汽车数字孪生电厂3d拆解爆炸图3d 优化排产模型虚实联动智慧养老智慧社区虚拟现实 VR AR数字孪生技术知识电力3d可视化智慧路网3d数字沙盘智慧工业智慧工厂智慧城市智慧园区智能建筑智能家居智能制造智慧农业智慧水利智慧文旅AR虚拟仿真VR虚拟现实智慧港口码头智慧仓储智慧工地道路交通3d建模3d 选型选配智慧车站广东3d可视化福建3d可视化智慧农场智慧牧场智慧水产浙江3d可视化智慧桥梁智慧隧道智慧校园智慧课堂智慧图书馆智慧体育智慧医院智慧医学智慧医药江苏3d可视化机械设备机械零配件机械加工设备包装机械设备工程建筑机械电子制造设备山东3d可视化智慧金融智慧车联网生物科技智慧景区智慧博物馆智慧酒店智慧餐饮智慧游乐场VR全景展厅VR看房VR看车VR展览VR旅游VR校园广西3d可视化湖南3d可视化智慧城建智慧生态智慧节能智慧环保智慧公园智慧小镇智慧应急管理智慧市政智慧生活智慧物业智慧路灯智慧照明智慧灯杆智慧指挥中心智慧安防智慧消防智慧井盖智慧管网综合管廊智慧党建智慧政务智慧戒毒智慧档案智慧办公智能驾驶智慧停车智慧充电桩智慧海关智慧家庭电子购物智慧出行三维数据采集倾斜摄影航拍湖北3d可视化3d点云扫描720全景VR数字孪生系统江西3d可视化建筑楼宇数字沙盘生活用品交通运输电子电工污水处理设备医疗器械农业机械设备乘用车专用车非机动车汽车配件汽车用品安徽3d可视化楼宇3d可视化数字孪生园区数字孪生学校建筑3d可视化河南3d可视化智慧机房河北3d可视化智能电梯学校教育3d建模智慧分拣中心华南3d可视化华东3d可视化华中3d可视化华北3d可视化东北3d可视化西南3d可视化西北3d可视化台港澳3d可视化制造业工厂院前急救临床检验厨具餐具三维卫浴洁具三维物理康复风电场设备办公3d模型商业3d模型住宅3d模型厂房3d模型场馆3d模型体检诊查医用光学手术设备病房护理规划地产数字沙盘工业产线数字沙盘能源电力数字沙盘工业制造三维建模能源电力三维建模交通运输三维建模建筑楼宇三维建模健康医疗三维建模教育培训三维建模3d数字展馆3d虚拟商城实验室可视化宿舍可视化智慧工业园区智慧科技园区智慧物流园区智慧办公园区智慧商业园区智慧住宅园区产品3d动画工业3d动画气体工程设备党建3d展厅艺术3d展厅企业3d展厅工业3d展厅文博3d展厅门窗3d展示3d三维布局图3d悬浮小岛粉体机械设备服装选款选配冶金工程设备3d内部结构图3d 部件编辑矿山机械设备水电站设备热电站设备变电站设备能源站设备灯具辅控3d园区点云扫描2D纹理扫描场站点云扫描工厂点云扫描以下是关于工厂实景 3D 建模倾斜摄影无人机采集的相关内容: